

Courtesy: Chelsea Turner
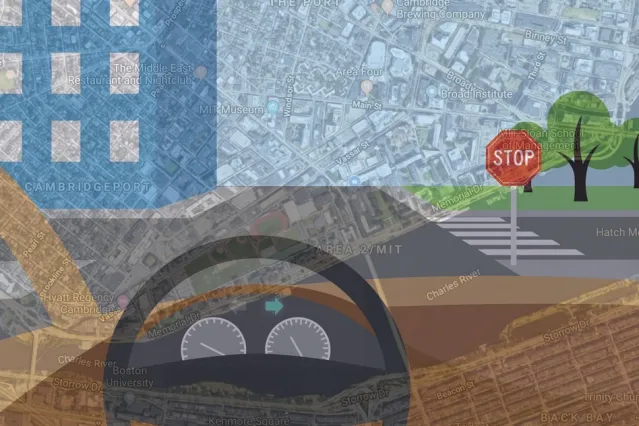
There are more than 60 companies in the United States alone that are developing technologies for self-driving cars. While some are rethinking maps at an unprecedented centimeter-level resolution, others are finding ways to make the sensor rig affordable to the consumer. A team of researchers at Massachusetts Institute of Technology (MIT), meanwhile, is trying to bypass all the fuss by getting autonomous vehicles to mimic human driving patterns – using only simple GPS maps and video camera feeds.
While human drivers can easily navigate in new, unfamiliar locations if they are armed with a basic map, the driverless cars being tested currently rely on computationally-intensive, meticulously-labeled maps. These maps, which have been created from LiDAR scans, are so massive that it takes 4,000 gigabytes of data to store just the city of San Francisco.
MIT says it can get the job done in much less. The maps which its system Variational End-to-End Navigation and Localization is using capture the whole world using only 40 gigabytes of data.
So, how does this thing work?
MIT’s system uses a machine learning model which is commonly used for image recognition. The model trains by observing a human driver steer in real life conditions. To explain the technology better, Daniela Rus, director of the Computer Science and Artificial Intelligence Laboratory (CSAIL) and co-author of the research paper, gives the example of how the system would react to a T-shaped intersection.
“Initially, at a T-shaped intersection, there are many different directions the car could turn,” Rus says. “The model starts by thinking about all those directions, but as it sees more and more data about what people do, it will see that some people turn left and some turn right, but nobody goes straight. Straight ahead is ruled out as a possible direction, and the model learns that, at T-shaped intersections, it can only move left or right.”
The researchers have tested the system with randomly chosen routes in Massachusetts and it has proven successful in recognizing distant stop signs or line breaks on the side of the road as signs of an upcoming intersection. Every time it intercepts an intersection, the system rummages through its steering command database to make a decision just like a human would.
Learn more about the technology the video below and tell us how successful do you think it would be in making self-driving cars a reality in the near future.


#Featured



Next article

Are you looking for the perfect Christmas holiday gift for the geography lover in your life? Or do you want gifting ideas for someone who loves to travel, surf, dive, or snowboard? Your search ends here! We have curated the most awesome 2019 gift recommendations for geogeeks. Check it out…
Activity Maps by Awesome Maps: $39 onwards

The product of a Kickstarter campaign, Awesome Maps will make for an ideal holiday gift for all those people in your life who are passionate about exploring the world. Their maps are based around activities such as surfing, diving, hiking, climbing, fishing, golfing, etc., and are hand-drawn from scratch, with at least 6 months of brainpower, pure passion, and creativity going into each map.
Offer: Christmas delivery is guaranteed with Express. Free paper map with every canvas order!
All-Weather, Wearable Maps by SplashMaps: $27 onwards

Designed for the real outdoors, SplashMaps has emerged as the much-needed fabric alternative to rain-soaked paper maps. Their washable and wearable range of maps includes ‘Toob’ neck warmers, unique accessories and apparel, and beautiful satin maps. One of the first companies to secure Kickstarter funding in the UK, SplashMaps takes pride in manufacturing accurate and indestructible maps.
DJI Tello: $79 onwards

If the geogeek in your life likes gadgets, you should know that this ultra-affordable beginner drone weighs only 80 gm and is suitable for everyone – from kids to first-time pilots. One of the best beginner drones with a 5MP camera, DJI Tello will make for the perfect companion on that holiday road trip. And did you know Tello can perform impressive aerial maneuvers (including flips in up to 8 directions) and follow pre-programmed flight routines?
Custom-made Maps from Ordnance Survey: $22 onwards
(UK Special)

Do you want a one-off but affordable gift that has been completely tailored for the recipient? Great Britain’s national mapping agency Ordnance Survey is offering a bespoke solution where you can choose your own center point, add titles and a cover image, and create a unique map that can be folded flat or framed.
Christmas offer: You can get 15% off with code GETITBYXMAS. Includes free postage in UK.
3D Topographic Maps by MapScaping: $15 onwards

All the gorgeous maps that MapScaping makes are based on real elevation data. Millions of data points are processed into sophisticated topographic maps, with elevation measurements for every 30 meters (98 feet) being used to create map art that reveals all the hidden patterns in the landscape.
World Map Coloring Tablecloth by Uncommon Goods: $30

If you are looking to spark an interest for geography or maps in a young member of the family, this illustrated tablecloth could be the perfect starting place. It doesn’t matter if your little one hasn’t been to Machu Picchu or the Taj Mahal yet, but they could get a peek at the wonders of the world next time they travel to the dinner table!
Wayfinding: The Science and Mystery of How Humans Navigate the World: $20.49
Author M.R. O’Connor travels the Arctic, the Australian bush and the South Pacific to talk to neuroscientists, anthropologists, and master navigators, and discovers how navigation ultimately gave us our humanity. Library Journal recommends Wayfinding for readers curious about nature, science, the human brain, and how we navigate the world. Definitely a gift that a geogeek would cherish!
Beeline Moto Special Christmas Bundles: $213 onwards

Made for cyclists and bikers, Beeline’s Moto navigation devices solve the problem of fiddling with the phone while riding a bike to figure out in which direction you need to go. Their products are beautifully minimalistic, guiding the rider intuitively with a single, clear arrow. Basically, think of it as a compass on steroids.
Geography-Themed Cushion Covers: $17.99

With artwork on both sides, these unique pattern design cushion covers showcase exquisite prints such as maps and navigation compass. Suitable for sofa, bed, home, and office, they ship in sets of 4 and come with a 3-month free replacement warranty.
Coral Cup by Nervous System: $40

This computationally-generated and handcrafted porcelain cup’s topography is reminiscent of many forms in nature from the ridges of sand dunes to folds of brain coral or even the wrinkles of fingerprints! It is available in three colors: white, charcoal, and seafoam.
Note: Holiday Shipping deadline for US orders is Friday 12/20. Select USPS priority or express shipping

