
Maps as Infrastructure, Navigation as Interface: Key Takeaways from Mapbox at The Next Geo 2026
At this year’s The Next Geo event, held online April 20–24, one theme surfaced repeatedly across discussions about mapping, navigation, and AI: geospatial technology is no longer simply a visualization layer. It is operational infrastructure.
The shift from visualization platform to fundamental infrastructure framed two major sessions with speakers from Mapbox at the event. In the opening keynote, the Senior Vice President of Location Services at Mapbox, Cherie Wong, explored how maps evolved from static visual products into programmable systems underpinning logistics, mobility, AI applications, and modern digital services. Later, in a fireside chat session, Liam Bresnahan and Åsa Forsell discussed the underlying infrastructure and engineering systems required to build navigation experiences for environments where reliability, clarity, and timing directly affect user outcomes.
Together, the sessions offered a compelling snapshot of where the geospatial industry is heading. They also reflected how the boundaries between maps, software infrastructure, real-time systems, and AI are rapidly disappearing.
For longtime geospatial professionals, many of these trends may feel like the culmination of years of technical evolution. For newer developers entering the space, the talks provided a useful framework for understanding why maps increasingly sit at the center of modern software systems rather than at the periphery.
Maps became ‘infrastructure’ when users stopped noticing them
One of the strongest ideas from Cherie Wong’s keynote was deceptively simple: infrastructure succeeds when it becomes invisible.
Wong opened with relatable scenarios. A food delivery driver receives route guidance that already accounts for traffic and road closures. A utility field engineer’s schedule dynamically updates while traveling between appointments. Neither worker actively thinks about the mapping system underneath the experience. They simply expect it to function. That expectation changes the role of mapping entirely.
Historically, maps were treated primarily as visual artifacts. They were products people looked at. Today, they operate more like cloud infrastructure or payment networks: systems other systems depend on. When they fail, the consequences are immediate and operational.
Sophisticated mapping is no longer defined solely by visual fidelity. It is defined by whether users can interpret environments quickly and act confidently.
The future of navigation is not photorealism
The demands of navigation contexts and tension between representing reality without distracting users led to one of the most interesting concepts discussed during the session: the “symbolic realism” approach that Mapbox applies to map design.
As mapping technology becomes more visually advanced, there is an understandable temptation to pursue increasingly photorealistic digital twins of the world. Forsell argued against that direction for most navigation use cases. The goal, she explained, is not to reproduce every visual detail of reality. The real world is noisy, cluttered, and visually dense. Instead, navigation systems should selectively surface the details users need at specific moments.
Rather than creating exact replicas of streetscapes, Mapbox maps and navigation systems built using them emphasize a simplified but contextually accurate representation of reality that is optimized for orientation and decision-making. Lane markings, bridge elevations, overpasses, and intersection structures become critical when users approach complex maneuvers. In simpler environments, much less detail may be necessary.
The Mapbox design philosophy also acknowledges a practical truth about real-world environments: they change constantly. Buildings get repainted. Advertisements change. Streets evolve incrementally. Maintaining fully photorealistic synchronization at global scale would be nearly impossible and potentially counterproductive. Instead, modern navigation increasingly focuses on conveying operationally relevant spatial context.
High-definition maps require entirely new data pipelines
Both sessions with Mapbox speakers also underscored how dramatically modern mapping systems have expanded beyond traditional cartographic data sources.
In the fireside chat, Forsell described the extensive combination of telemetry, satellite imagery, aerial imagery, machine learning models, road elevation data, and sensor fusion required to generate lane-level navigation experiences. The discussion shared a look inside modern mapping infrastructure that increasingly resembles distributed perception systems rather than static geographic databases.
Vehicle telemetry plays a particularly important role here. In the keynote, Wong explained that every connected vehicle effectively becomes both a consumer and contributor to the map ecosystem. The resulting ‘living’ network of real-time sensors creates powerful feedback loops for detecting anomalies, updating road conditions, and maintaining HD lane models. It also fundamentally changes update expectations. In traditional mapping systems, updates might occur quarterly or annually. In modern mobility systems, a construction project can invalidate a lane model immediately.
For geospatial professionals, this may be one of the most consequential industry shifts currently underway. Mapping is increasingly becoming a live systems problem rather than a publishing problem.
Customization became a competitive requirement
Another recurring theme throughout both Mapbox sessions was customization.
Historically, many digital maps looked and behaved similarly because the underlying systems offered limited flexibility. Today, companies increasingly expect location experiences to reflect their own operational requirements and brand identities. Wong highlighted how Tripadvisor rebuilt its platform using Mapbox infrastructure to create a stronger sense of place and improve user engagement. Similarly, BMW uses Mapbox SDKs to create navigation experiences tailored specifically to its vehicles and driving environments.
The fireside chat reinforced the developer-centric philosophy at Mapbox. Forsell emphasized that developers need complete flexibility to adapt visualization styles dynamically depending on context. A dense 3D navigation view may be appropriate in one scenario, while a simplified 2D representation may work better elsewhere.
Flexibility is increasingly essential because location interfaces are no longer standalone products. They are embedded inside logistics systems, automotive platforms, retail experiences, AI assistants, field operations software, and consumer applications. In this new reality, maps need to adapt to products rather than forcing products to adapt to maps.
AI is changing the role of geospatial systems
Although the sessions focused heavily on mapping and navigation, AI emerged as a major undercurrent throughout both sessions and indeed across the entire The Next Geo event. As Wong described in the keynote, spatial intelligence is rapidly emerging as the “next frontier” for geospatial infrastructure.
Importantly, Wong’s reflections moved beyond generic AI enthusiasm and instead focused on a more concrete idea: AI systems increasingly require reliable spatial reasoning capabilities. Questions such as “Where should the next retail location open?” or “What is the most efficient route balancing terrain, traffic, and connectivity?” depend on infrastructure-grade geospatial systems. AI models alone cannot solve these problems without accurate spatial context.
Wong also referenced the emergence of tools like MCP servers and reusable agent skills designed to help AI systems interact with geospatial infrastructure.
Infrastructure-grade reliability is becoming a prerequisite for the next generation of AI systems. A hallucinated recommendation inside a chatbot may be inconvenient. A hallucinated route or spatial decision inside a mobility or logistics workflow becomes much more serious. — Cherie Wong
The geospatial stack is becoming multidisciplinary
Perhaps the clearest takeaway across both sessions was that modern geospatial systems now sit at the intersection of many technical disciplines simultaneously.
Computer graphics, distributed systems, machine learning, telemetry pipelines, developer tooling, automotive systems, sensor fusion, mobile SDKs, cloud infrastructure, UX design, and AI orchestration all surfaced repeatedly throughout the discussions.
Even the organizational collaboration at Mapbox described by Bresnahan and Forsell reflected this reality. Navigation teams, rendering teams, data teams, and SDK teams continuously iterate together because modern location systems cannot be developed in isolation.
For developers entering the geospatial field today, this creates enormous opportunity. Geospatial work is no longer confined to traditional GIS workflows or standalone mapping products. It increasingly touches nearly every major area of software engineering.
At the same time, the industry is still early in this transition. Questions around standards, interoperability, autonomous systems, AI-driven interfaces, and precision positioning remain very much in motion. That uncertainty is part of what makes the space so dynamic right now.
Why these conversations matter
One reason that the two Mapbox-led sessions resonated so strongly during The Next Geo 2026 is that they moved beyond surface-level discussions about maps and AI. Instead, they focused on the operational realities of building systems people depend on every day.
The talks also reflected a broader evolution happening across the geospatial industry itself. Location technology is no longer niche infrastructure sitting quietly in the background of specialized applications. It increasingly shapes transportation, commerce, logistics, energy operations, tourism, automotive experiences, and AI systems used by billions of people.
And yet, as Wong observed in her keynote, the best infrastructure remains largely invisible. Users rarely stop to think about the extraordinary technical systems coordinating live traffic flows, updating lane geometry, rendering navigation scenes, or grounding AI responses spatially in real time. They simply expect these systems to work.
For anyone interested in where geospatial technology is heading next, both sessions are well worth watching in full. The keynote provides a wide-angle perspective on how mapping evolved into global digital infrastructure, while the fireside chat offers a detailed and refreshingly candid look at the technical tradeoffs involved in building modern navigation systems at scale.
Did you like this post ? Read more and subscribe to our monthly newsletter!

#Events


Next article

GeoAI’s roots go back to early work on AI for geographical problem solving in the 1980s. The field was later formally introduced in 2018, as AI, geospatial big data, and high-performance computing began to converge. Since then, GeoAI has depended heavily on the cloud. Large models were trained and deployed in data centers because they needed serious compute, memory, and power. This worked well when speed was not the main concern.
But field operations are different.
A drone detecting a wildfire cannot wait for every image to travel to a distant server. A self-driving tractor in a rural zone cannot pause until the cloud responds. A rescue team working after an earthquake cannot depend on cell towers that may already be damaged – This is the cloud latency wall. The model may be intelligent, but the connection becomes the weak point.
Modern sensors can collect data faster than field networks can send it to the cloud. In disaster response, drone teams can produce hundreds of gigabytes of imagery (even 350 GB per emergency!) that must reach decision-makers quickly. In autonomous farming, John Deere’s autonomous tractor uses onboard cameras and neural networks to classify each pixel in about 100 milliseconds, helping the machine decide whether to keep moving or stop.
This is why GeoAI is moving closer to the sensor. Instead of sending all data to the model, the model is moving to the data. Smaller AI systems now run directly on drones, tractors, smartphones, satellites, cameras, and handheld GIS devices.
This article looks at the rise of on-device GeoAI. It explains how models are being compressed, how small language models can support spatial queries, how new mobile chips are making local inference faster, and why privacy, sovereignty, and reliability are pushing geospatial intelligence away from cloud-only systems.
How to Fit the Model: Quantization and Pruning
To run GeoAI on a drone, phone, tractor, or field sensor, developers first have to shrink the model.
Large AI models are made of numerical weights. In many full-size systems, these weights are stored in FP32, a 32-bit format that gives high precision but also uses more memory and power. That is fine in a data center. It is harder on a small device with limited battery life.
Quantization solves part of this problem. It reduces the precision of the model’s numbers from FP32 to INT8, 4-bit, or other smaller formats. It is like rounding a long decimal into a shorter one. The model loses a little detail, but it becomes much lighter and faster.
For GeoAI, the goal is not just compression. The model still has to detect buildings, roads, ships, crop stress, or fire lines correctly. A study on mixed-precision quantization for SAR ship detection showed that low-bit quantization can greatly reduce model size while keeping the accuracy loss small.
Pruning works differently. It removes parts of the model that do not add much value. Distillation is another method, where a large “teacher” model trains a smaller “student” model to keep the most useful patterns.
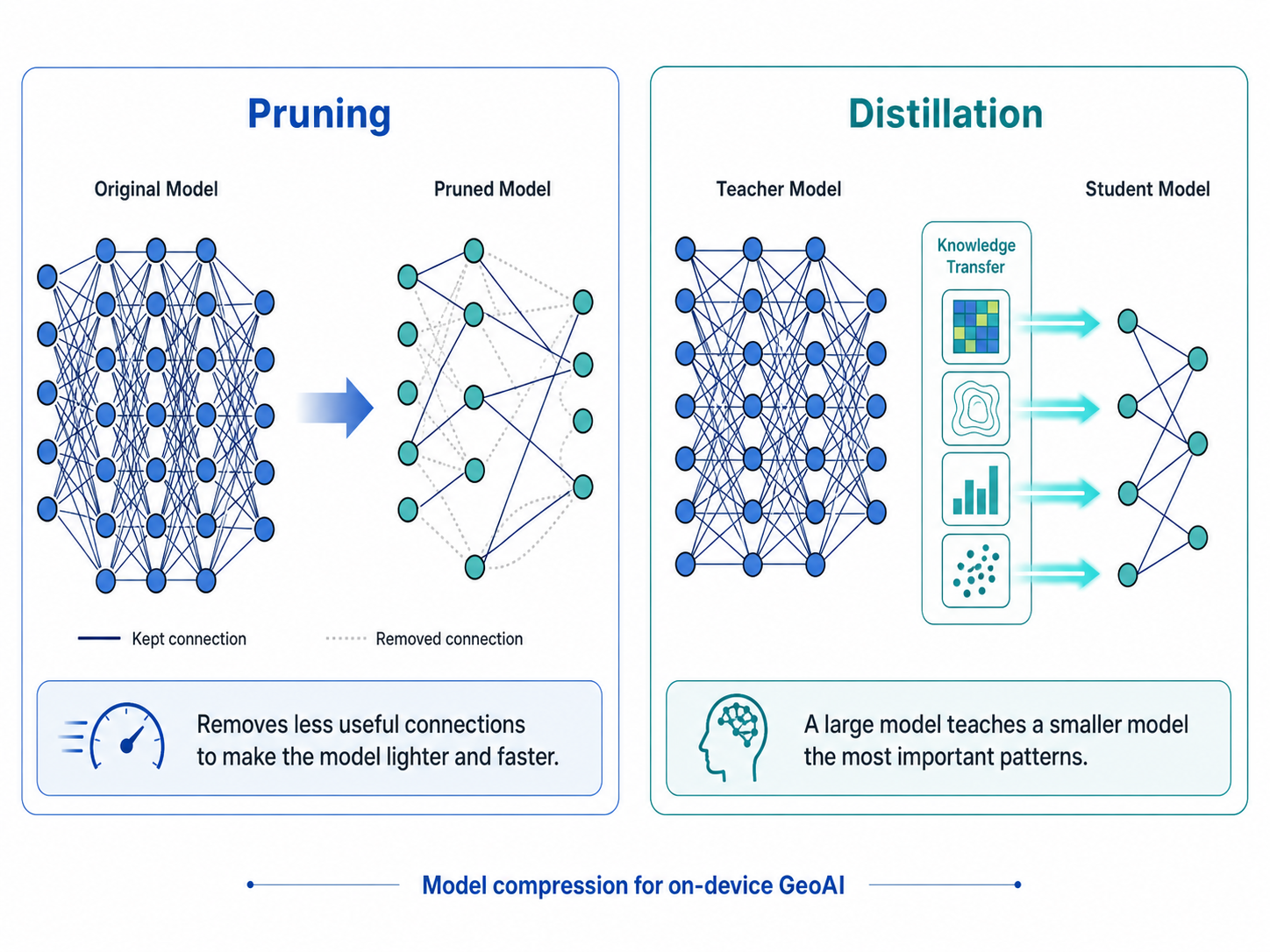
Source: AI Imagery
But spatial models are harder to shrink than text models. A text model can survive a slightly awkward sentence. A GeoAI model may not survive a small location error. A few meters can decide whether a building is inside a flood zone or outside it. This is why methods like AlignQ matter. They focus on reducing quantization error while preserving useful relationships in the data.
For on-device GeoAI, shrinking is not just optimization. It is what allows spatial intelligence to leave the cloud and work where the decision happens.
Small Language Models for Spatial Querying
The way people use maps is also changing. Instead of clicking through complex GIS menus, a field worker may soon ask a device a simple question: “Show me all drainage pipes within 5 meters that are likely blocked.”
Unlike very large cloud models, SLMs are designed to run with fewer parameters and lower compute needs. Microsoft’s Phi-3-mini, for example, was introduced as a 3.8 billion parameter model small enough for practical local deployment. Google’s Gemma models are also designed for applications that can run across laptops, phones, and cloud environments.
For GeoAI, this means the map can become more conversational. A worker could ask about nearby assets, blocked drains, unsafe routes, or parcels inside a flood zone. The device would not need to send every query to a remote server. It could interpret the question locally, check local map layers, and return an answer in the field.
The key technique here is fine-tuning. LoRA, or Low-Rank Adaptation, allows developers to adapt a model for a specific task without retraining every parameter. For GIS, this could mean tuning a small model on local road names, coordinate systems, asset layers, and spatial rules.
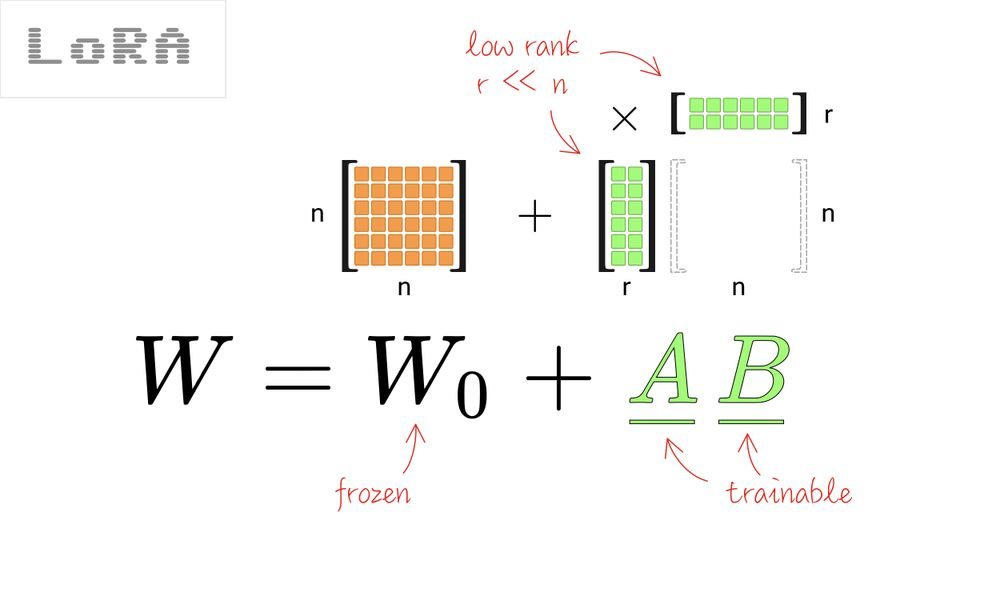
Source: Towards Data Science
This matters because geography is local. A general model may understand the idea of a road, but a useful field model needs to understand this road, this drainage network, and this emergency route.
In this sense, the future map is not only something we view. It is something we ask.
Hardware-Aware GeoAI: NPUs and Mobile Silicon
Shrinking the model is only half the story. The device also needs the right hardware to run it. This is where NPUs (Neural Processing Units) become important. Unlike CPUs, which handle general tasks, NPUs are built to run AI models efficiently. They allow phones, drones, and edge computers to process images, language, and sensor data with lower power use.
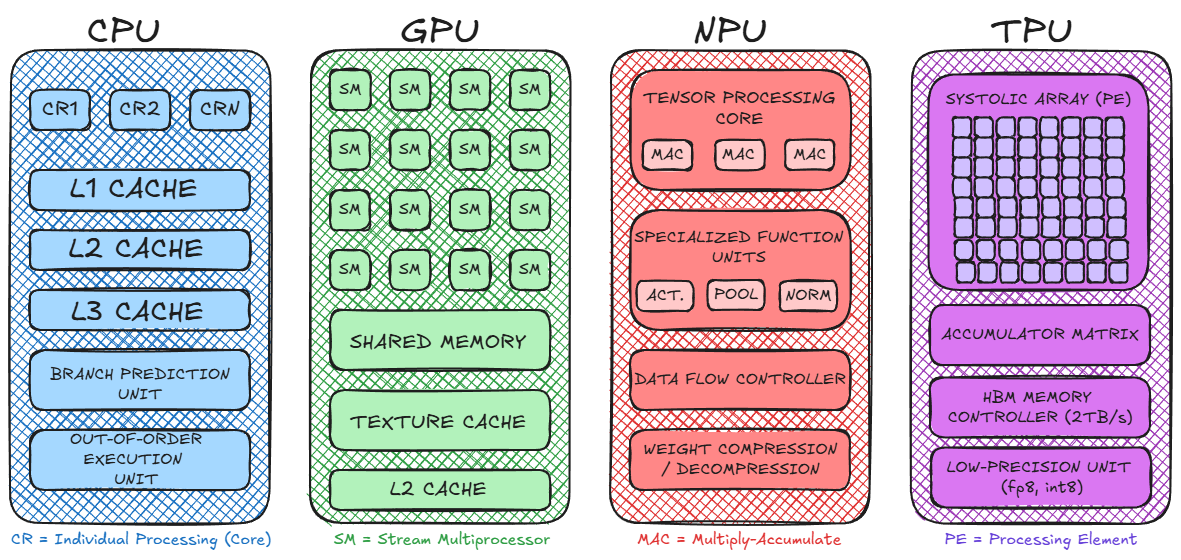
Source: Koshiq Hossain
For GeoAI, this matters because many tasks are visual. A drone may need to detect a damaged roof. A phone may need to recognize a blocked road. A field camera may need to identify a change in land cover. These tasks are too slow if every frame has to travel to the cloud.
Developers are now using tools such as the Qualcomm AI Stack and Apple Core ML to optimize models for the chips inside real devices. The goal is not only accuracy. It is also speed, battery life, and heat control.
Drone hardware is moving in the same direction. DJI’s Manifold 3 offers up to 100 TOPS of AI compute in a small onboard unit weighing about 120 grams. That kind of edge computing allows drones to analyze imagery while they fly, instead of waiting for cloud processing.
This also connects to GPS-denied mapping. Niantic Spatial describes visual positioning systems that use sensors and computer vision to support positioning when GPS is weak or unavailable.
In on-device GeoAI, hardware is no longer just support infrastructure. It decides what the model can actually do in the field.
Privacy, Sovereignty, and “Zero-Cloud” GIS
Speed is not the only reason GeoAI is moving to the device. Privacy and sovereignty matter too.
Geospatial data is often sensitive. A drone image may show a military site. A utility map may reveal the location of power lines, water pipes, or telecom assets. A disaster response map may include the movement of emergency teams. Sending that data to the cloud can create legal, security, and political risks.
This is why many organizations are looking at “zero-cloud” GIS. The idea is simple: process the data where it is collected, and avoid sending sensitive information to a remote server unless it is truly needed. The push is already visible in the wider AI market. IDC predicts that by 2028, CIOs will increase investment in sovereign-ready cloud and data localization environments by 65%. The same logic applies to GeoAI, where location data can be more sensitive than ordinary business data.
Defense and public safety are clear examples. SIPRI’s work on the military AI industry shows how AI is becoming part of national security systems, where control over data and infrastructure is critical.
On-device GeoAI also helps when networks fail. Edge AI systems can support real-time intelligence without cloud connectivity, which matters for first responders, defense teams, and field crews working in remote or damaged environments.
In this context, small models are not just efficient. They give organizations more control over their maps, their sensors, and their decisions.
The rise of on-device GeoAI changes the way we think about geospatial intelligence.
For years, the industry imagined one large model in the cloud that could understand everything. But the future may look different. Instead of one central “god model,” we may see millions of smaller geospatial agents working inside phones, drones, sensors, vehicles, and satellites.
The evidence is piling up. . Esri is bringing GeoAI and foundation models into geospatial workflows. DJI is encouraging developers to build onboard AI applications for drones. Niantic Spatial is working on visual positioning systems that help machines understand location when GPS signal is weak or unavailable.
For GIS developers, this changes the skill set. Training a model is no longer enough. The next challenge is making that model small, fast, private, and reliable enough to work where the decision happens.
The most useful GeoAI will not always be the largest model. It will be the model that can run in the field, understand the local context, and act at the right moment.
Did you like this post? Follow us on our social media channels!
Read more and subscribe to our monthly newsletter!

