
Far from being a novelty, car safety has been an important subject since the 19th century. From the invention of the hydraulic brake system to the introduction of seat belts and airbags, the world continues to recognize the need for safety in – and outside of – the car.
With the rise of autonomous driving (AD), there is a new challenge on the horizon. For the first time in history, maps will play a critical role in ensuring the safety of passengers and pedestrians alike. When humans are removed from the driving equation, maps and sensors become the vehicles’ eyes instead.
The implications? Wide and far-reaching.
Their importance? Life-saving.
A new safety model
Classical functional safety is well established in the automotive industry. Until now, compliance with ISO26262, which describes the functional safety of road vehicles, has kept us safe on the road by ensuring that systematic and random hardware and software failures are detected and mitigated as necessary.
But what got us here won’t get us there.
When it comes to the new mobility revolution called autonomous driving, the industry will need to agree on new safety standards regarding maps. One recent development is ISO/PAS 21448, which looks at the safety of the intended functionality.
With 27 years of map-making expertise and maps for automated driving that already power half a million Level 1 and Level 2-enabled automated vehicles on the road today, TomTom is well positioned to contribute to solving these industry challenges.
Making maps AD-proof
Once decision-making moves from the driver to the vehicle, HD maps and sensors take over. Regardless of road conditions, HD maps confirm what the sensors see to keep passengers safe and on the move.
For this reason, HD maps are crucial to the autonomous driving equation. They improve a driver’s – man or machine – field of view through an accurate representation of the road ahead and the neighboring environment. Much like the watchful eye of a drone in the sky, or the collective memory of millions of cars that travelled the same road in the past.
So how do we make maps that are able to handle all challenges thrown at them by an autonomous vehicle?
We start by asking questions.
Three considerations
If maps have an impact on the autonomous vehicle’s safety, then how do we measure their own safety and integrity to ensure optimal performance?
How good should the map be? What metadata should be delivered along with it for a car to reason about the environment, localize itself and plan safe routes?
Below we discuss three considerations.
- Speed
If map data, software and services are to be used in safety critical applications for autonomous driving, then it is paramount to bridge the gap between the moment a road change happens and the time it is reflected in the map.
TomTom today is already able to detect and process map changes in a matter of seconds. We do this through our transactional map-making platform, highly automated map production using machine learning techniques and the application of crowdsourcing for the maintenance and efficiency of our on-demand delivery system.
As map changes are reflected at this incredible speed, the map should also retain its integrity, without any loss or degradation of the map database when it is updated in the user equipment.
Our answer to this challenge is AutoStream, TomTom’s map delivery system. It enables a vehicle to build a horizon for the road ahead by automatically streaming the latest map data from the TomTom cloud.
- Quality
For quality purposes, localization should be accurate at the level required for the application. To ensure the right level of accuracy, mapmakers must exert control over map quality through four operational elements:
- Data collection. Is the data correct?
- Data processing. What controls are in place to ensure quality and prevent errors?
- Data provision/release. How will any loss during data transformations be avoided?
- Data security. How will any external manipulation be prevented?
- Cost
Guaranteeing safety at the level required for autonomous driving is paramount, but it has a steep price. The challenge for mapmakers is to make sure that safety does not come at the cost of affordability for the end user. As additional protocols for data sourcing and production are created and the velocity of engineering teams changes, mapmakers will need to walk the tightrope of cost versus benefits to achieve uncompromising quality at a reasonable price.
A view to the future
TomTom maps power all levels of autonomous driving today. But, before AD reaches market maturity, a new industry safety standard needs to be in place.
What will it look like?
This is the question that TomTom and the industry need to answer.


#GeoDev



Next article

 We share our location thousands of times a day, sometimes we explicitly share with individuals, other times we share to specific platforms, and still other times the sharing is deeply embedded in the systems we use. In each case we share our location information, we are giving up some of our geo-privacy.
We share our location thousands of times a day, sometimes we explicitly share with individuals, other times we share to specific platforms, and still other times the sharing is deeply embedded in the systems we use. In each case we share our location information, we are giving up some of our geo-privacy.
“Find my Friends” is a very common example of explicit geo-privacy sharing, so we can see where our friends are on a map in relation to ourselves. In many social apps you can “check-in” and share your location as part of social community, putting yourself as a dot on a map for others to find. But you may not be as aware that your location may also be constantly tracked from non-map apps, logs of IP address, and by your mobile provider.
Organizations: Adopt a Location Strategy
As an organization, you must be very aware of how you are using and storing location information. Most organizations have location information, such as mailing addresses (employees, customers, and suppliers), facility locations, and perhaps real-time feeds of their workers. How is that data managed? If it got out or was shared, what could that information reveal? Is there a certain pattern that could put people or assets at risk? Accessing this information over time can reveal patterns and compromise privacy. If this information gets into the wrong hands, it could have devastating effect.
![]() Do you track your employee’s daily locations? Many organizations use employee tracking to optimize operations and improve security, but you may also be ‘tracking’ employees via their IP addresses when they access your company’s network. If so, what are you doing with that information? Just as PII (Personally Identifiable Information) has become something that CIOs need to worry about, so is PLI – Personal Location Information. Your organization needs to have a policy around what data is kept and why and who can get access to it.
Do you track your employee’s daily locations? Many organizations use employee tracking to optimize operations and improve security, but you may also be ‘tracking’ employees via their IP addresses when they access your company’s network. If so, what are you doing with that information? Just as PII (Personally Identifiable Information) has become something that CIOs need to worry about, so is PLI – Personal Location Information. Your organization needs to have a policy around what data is kept and why and who can get access to it.
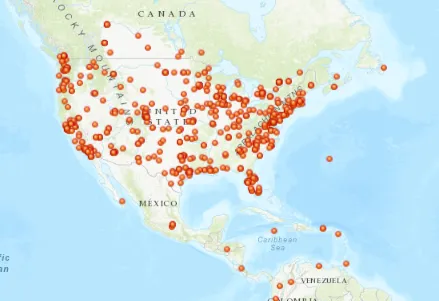
You may feel reassured when people tell you, “don’t worry that data has been anonymized” so they cannot track an individual. But the reality is at some point it wasn’t anonymous. Is that data on your system? Even if the anonymized data is all you have now, it can still be analyzed and individual patterns derived. Let’s say, for example, that you have data from a company that has an exercise app. They shared the anonymized data with researchers to help them better understand where people are exercising (all good intent). But if you were to look at who was jogging at 5:00am in a neighborhood, you could see individual tracks, and by tracking the start and end position over a few days you probably know where that person lives, which leads to a name, to an email, to web sites visited….
If your organization collects this sort of data, you need to consider if removing the names is enough if you share this data with others. Ultimately, as part of a location strategy for your organization, you need to understand how you use location information to help your organization and how you protect and manage personal location information.
Individuals: Take Ownership of Your Location Data
As an individual what can you do to manage your own personal location information? First and foremost, don’t share your location with everyone. It sounds simple – and it usually is – but you should only share your location with your friends when you are in an app.
If you use an app for work, check on its tracking settings. It should be using your location only when the app is open. Then, only open the app when on the clock. Ask your employer how they manage this information. Ask them if they have a geo-privacy policy and understand what information they collect and store.
And finally check your location history. Many platforms save your location history and use it to improve the convenience of the app for you. This may include things like your search history and most visited locations. You can easily delete or reset it.
Developers: Just because you can, doesn’t mean you should
 As an application developer, you should think beyond specific XYs. If your application allows people to share their location, how specific does it really need to be? Just because the GPS gives you 6+ numbers after the decimal, do you really need that precision? I would argue probably not.
As an application developer, you should think beyond specific XYs. If your application allows people to share their location, how specific does it really need to be? Just because the GPS gives you 6+ numbers after the decimal, do you really need that precision? I would argue probably not.
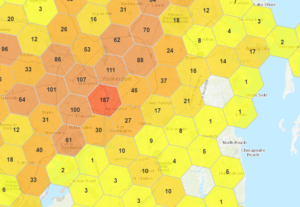
When sharing data, can you easily aggregate or generalize it at different resolutions as appropriate to obscure the source (hexagons are a great aggregation method). And it’s not just how you display the data, what you store is equally important, the less data you store, the easier it is to protect privacy.
Just because you can track individuals very precisely, doesn’t mean you need to store all that precision, nor does it mean you should analyze and share that precise data with others.
Personal Location Information – Harmless or Do No Harm?
We share all sorts of information, isn’t your Personal Location Information just like all that other information? I would argue no.
![]() Sharing your thoughts, opinions, dreams, apparitions, or the fact you like pineapple on pizza does not impact you in the physical world. (Although the pineapple thing might get you in trouble.) But location matters. If your location details are no longer private, any digital attacks can easily become physical. PII is increasingly regulated, but Location is a key aspect of your personal information that is not yet as closely guarded.
Sharing your thoughts, opinions, dreams, apparitions, or the fact you like pineapple on pizza does not impact you in the physical world. (Although the pineapple thing might get you in trouble.) But location matters. If your location details are no longer private, any digital attacks can easily become physical. PII is increasingly regulated, but Location is a key aspect of your personal information that is not yet as closely guarded.
There are plenty of reasons we share our location in today’s world, and individually these are mainly harmless. However, because location is persistent and can be matched with other information, others may be able to figure out a lot more about you than just where you get your coffee. And for you and your organization to effectively understand and deal with the issues of Personal Location Information, you must ensure you have a comprehensive geo-privacy location strategy.

